|
|
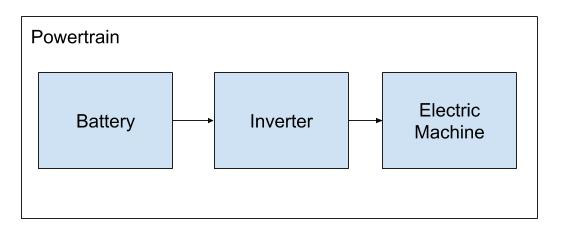
| Fig. 1: A block diagram depicting the three main components of an electric vehicle's powertrain. [10] (Source: J. Di) |
Cars are one of the backbones of global society today. Many people rely on cars, buses, and trucks for their daily transportation and livelihood. Yet the last 200 years of industrial development have created an energy and environmental crisis; the automotive industry consumes a significant amount of energy and contributes to environmental degradation through carbon emissions. [1] As a result, both academia and industry are working towards "greener" vehicles: electric vehicles.
Much has been written already about electric vehicles even within this course, such as their history, methods of power and hybridization, and their technology. [2-5] Common wisdom tells us that both hybrid electric vehicles (HEVs) and battery electric vehicles (BEVs) generally offer reduced fuel consumption compared to conventional vehicles, and in the case of BEVs, higher powertrain efficiency and no tailpipe emissions. However, several technological drawbacks for electric vehicles such as short driving ranges due to battery capacities and long charging times prohibit electric vehicles from being the de facto car for everyone. [6]
Thus, for members of the automotive industry, it becomes especially important to investigate the sources of energy loss in the individual vehicle design components, especially in the powertrain as shown in Fig. 1, and how that relates to the design of the whole.
For most electric vehicles, the "engine" of the car is actually not an engine at all, but a motor. Combustion engines in standard cars use pistons, crankshafts, and rods to transfer the gasoline combustion to a linear motion, which is then turned to a rotational motion. [4] But without the need for combustion, electric car "engines" are usually Permanent Magnet Synchronous Machines (PMSMs), which is a cross between a brushless DC motor and an induction motor. [7]
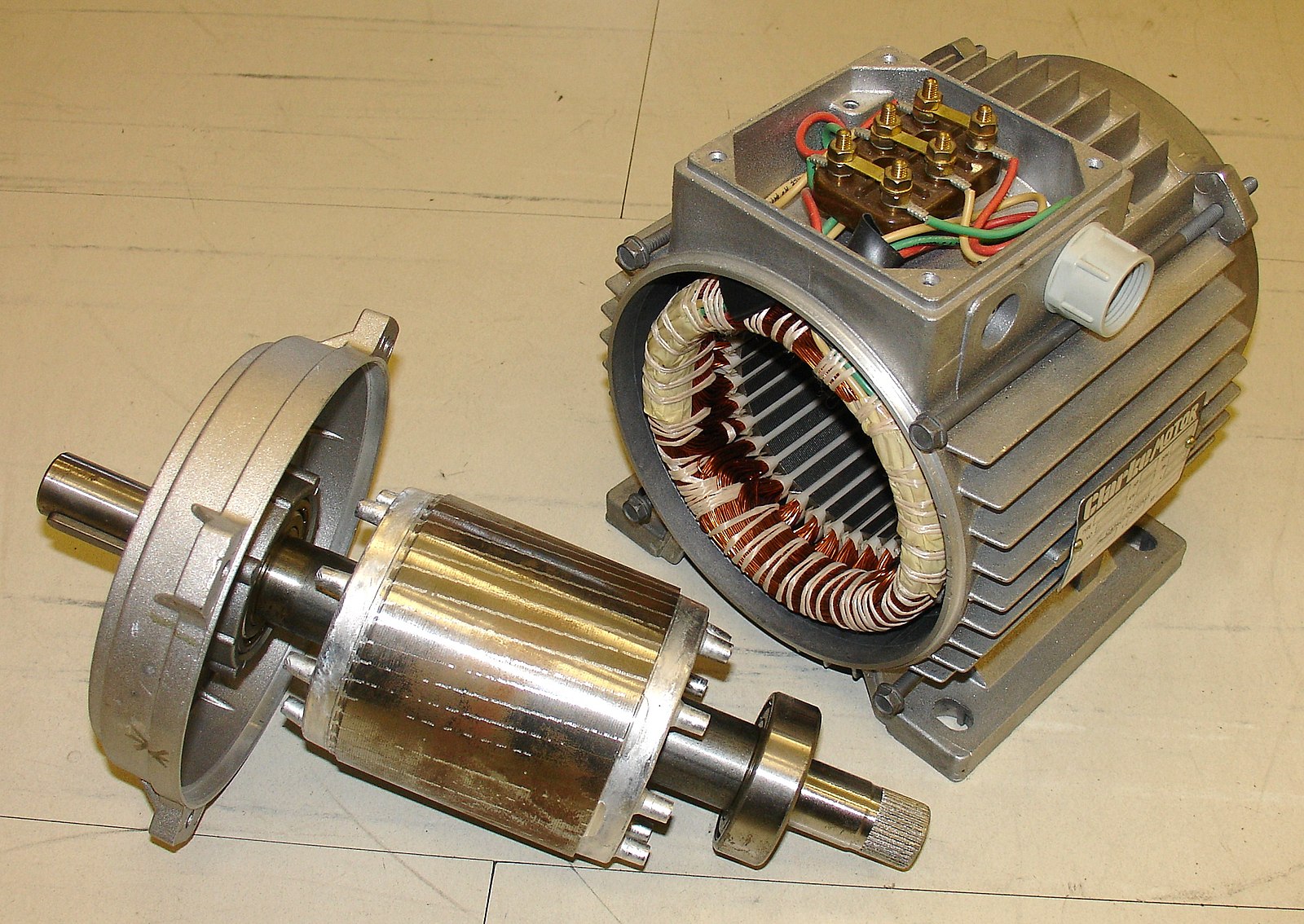 |
| Fig. 2: A photograph of a stator (left) and a rotor (right) from a three-phase inductive motor. (Source: Wikimedia Commons) |
To understand a PMSM, we should understand the differences between a brushless DC motor and an induction motor. A traditional three-phase induction motor, a photograph of which is shown in Fig. 2, contains a stator with a three-phase winding. This stator creates a rotating magnetic field when power is applied, which induces a current in the rotor, which then creates an opposing magnetic field that causes it to rotate in the direction of the stator's magnetic field. [8] A brushless DC motor also contains a stator with windings (though not sinusoidally wound), but a rotor which is actually a permanent magnet; as the stator is energized, the permanently magnetized rotor rotates with the magnetic field. Because the stator is not sinusoidally wound, this magnetic field rotation is not smooth and causes a slight jerk in the output of the motor, known as 'torque ripple'. [9]
A PMSM also has a stator and a rotor, where the stator is exactly the same as the stator of an classic three-phase induction motor, but with a rotor with permanent magnets like a brushless DC motor. The PMSM's stator also produces the same sinusoidal magnetic flux density in the air gap as an induction motor, so it will have a a smoothly rotating magnetic field and will not see any torque ripple effects in the commutation between the stator windings, a trait that makes AC-designed motors such as PMSMs and induction motors more suitable for applications like electric vehicles than a traditional brushless DC motor. [10] However, by incorporating permanent magnets like a brushless DC motor, a PMSM is inherently more efficient than a traditional three-phase induction motor because it eliminates the power losses in the rotor. [11]
With this in mind, that means that there are two major sources of electrical energy loss in a PMSM:
I2R Resistive losses in the copper windings in the stator.
Iron losses mainly in the stator core
Other sources of power loss are mechanical, such as friction in the bearings (though they are usually greased) and windage losses (which would be a function of revolutions per minute), and these mechanical losses will vary by the vehicle specifications. [7,12] There is some loss due to the skin effect in AC transmission, creating eddy currents, but these effects are fairly small compared to the other sources of loss. [13]
Few publicly available estimations of commercial PMSMs energy ratings exist, but an analysis based off of Toyota Prius tear-down include a power output of 46.0 kW, a total resistance of 75.2 mΩ and a maximum current of 125 A, which would lead to a 2% efficiency loss due to resistive losses in the motor. [14]
In order to convert battery DC voltage to three-phase AC voltage to drive the motor, the inverter in an electric vehicle will use power electronic switching devices, also known as power semiconductors. (Note that some synchronous machines may run on DC, in which case a DC-DC converter is usually needed, but we will not discuss that model.) This is usually accomplished with snubbing diodes and Insulated Gate Bipolar Transistors (IGBTs), technology that has rapidly over the last decade to make small-scale DC conversion economical. [15] The snubbing diodes are necessary to allow conduction paths for the current flow despite switching. The losses in the conversion are during conduction and switching through both the diode and the IGBT.
We assume that the losses dissipated in IGBTs and snubber diodes due to potential capacitive and inductive parasitics are negligble. In the IGBT, the main states for loss are the turn-on and turn-off phases as well as the constant on phase. [7] For snubbing diodes, most power diodes have fast switching processes, so the losses are mostly due to on-state losses. [8] Generally in a model, it is sufficient to model the losses in a single IGBT switch and assume linearity to find the total converter loss. In most BEVs, the topology used is a three-phase bridge inverter which is made up of 3 IGBT modules per phase leg of the inverter, though this will vary based on the exact vehicle model. [6] The Chevrolet Volt, which is a hybrid electric vehicle, uses 6 IGBTs for example. [12]
The equations for these different loss conditions can be written explicitly given our physical understanding of the device. For on-state conduction loss, this can be modeled with an integral form of Ohm's Law:
|
1 Ton |
× ∫ [Vce,on(t) × Ice,on(t)]dt |
Further equations for modeling IGBT and diode power losses can be found in Abdelrahman et al. and Fang et al. [12,16] Of course, IGBTs and diodes do not make up the entirety of the peripheral circuitry to support the PMSM; there are also heat sinks, capacitors, controller circuitry, sensor circuitry and bus bars, but the total power module energy loss will be dominated by the total IGBT and diode losses. [14]
Every electric vehicle needs an energy storage system. Generally, BEVs use lithium-ion battery cells due to their high energy density, and many notable electric car companies such as Tesla also have their own lithium-ion battery manufacturing. [17] Shown in Table 1 are some published characteristics of commonly used batteries in BEVs as of 2013, which details the numbers advantages of lithium-ion battery energy densities compared to other battery types. [6] However in industry, deriving a wholly accurate battery model can be mathematically challenging, and some behavior is characterized by look-up tables instead. [12]
|
||||||||||||||||
| Table 1: Characteristics of commonly used batteries in BEVs. [6] |
In the battery circuit model, one would normally model a battery as a voltage difference and an internal resistance in series. [8] This internal resistance may be different for the discharge and charging current load. Lithium ion battery cells typically have a maximum and minimum allowable terminal voltage and current (C-rate). A discharge rate of 1C means that the current is such that the battery will be discharged in one hour. [7] In this model, the main power losses in the battery are due to the internal resistance, and this power loss is given by Ohm's law as [8]:
To use some commercial vehicle numbers as an example, the battery for the previously mentioned Chevrolet Volt has an internal resistance of 0.09 ohms and a battery voltage of about 380 V when motoring at a constant 2014 revolutions/min, which would lead to an instantaneous power loss of about 34 Watts in the battery. [12]
Electric vehicle designers have a lot of factors that they may need to account for when selecting the components that make up the core part of their vehicle. These losses will add up and affect the overall design; a survey of commercial BEVs published in 2016 concluded that the powertrain energy consumption of 40 commercial electric vehicles totaled around 40% - 54% of total energy consumption during a New European Driving Cycle (NEDC), a standardized driving cycle used to test normal power consumption and driving range. [7] Minimizing the losses in the powertrain is quite important to the vehicle designer! We also note that this discussion of losses is simplified, and that the losses will vary based on the exact driving conditions, temperatures, vehicle configurations, and other variables; for example, faster acceleration times for performance vehicles are correlated with worse energy losses in the powertrain, and higher IGBT junction temperatures will be correlated with worse losses. [14]
© Julia Di. The author warrants that the work is the author's own and that Stanford University provided no input other than typesetting and referencing guidelines. The author grants permission to copy, distribute and display this work in unaltered form, with attribution to the author, for noncommercial purposes only. All other rights, including commercial rights, are reserved to the author.
[1] Y. Zong, "Outlook of Electric Car Batteries," Physics 240, Stanford University, Fall 2011.
[2] H. Hirshland, "History of Electric Vehicles," Physics 240, Stanford University, Fall 2016.
[3] B. Mok, "Hydrogen Fuel Cell Vehicles," Physics 240, Stanford University, Fall 2016.
[4] T. Veltman, "Diesel-Electric Hybrids," Physics 240, Stanford University, Fall 2010.
[5] D. Schultz, "Tesla Engine Superiority," Physics 240, Stanford University, Fall 2015.
[6] K. Rajashekara, "Present Status and Future Trends in Electric Vehicle Propulsion Technologies," IEEE J. Em. Sel. Top. P. 1, 3 (2013).
[7] E. A. Grunditz and T. Thiringer, "Performance Analysis of Current BEVs Based on a Comprehensive Review of Specifications," IEEE Trans. Transport. Electrific. 2, 270 (2016).
[8] J. E. Carryer, R. M. Ohline, and T. W. Kenny, Introduction to Mechatronic Design (Pearson, 2010).
[9] M. Kramer, "The DC Motor," Physics 240, Stanford University, Fall 2012.
[10] J. Hendershot and T. Miller, Design of Brushless Permanent-Magnet Machines (Motor Design Books LLC, 2010).
[11] M. Fitouri, Y. BenSalem, and M. N. Abdelkrim, "Analysis and Co-Simulation of Permanent Magnet Sychronous Motor with Short-Circuit Fault by Finite Element Method," IEEE 13th International Multi-Conference on Systems, Signals & Devices (2016).
[12] A. Abdelrahman, K. S. Algarny, and M. Z. Youssef, "A Novel Platform for Powertrain Modeling of Electric Cars With Experimental Validation Using Real-Time Hardware in the Loop (HIL): A Case Study of GM Second Generation Chevrolet Volt", IEEE T. Power Electr. 33, 9762 (2018).
[13] C. Harting, "AC Transmission Line Losses," Physics 240, Stanford University, Fall 2010.
[14] E. A. Grunditz, T. Thiringer, and N. Saadat, "Acceleration, Drive Cycle Efficiency, and Cost Tradeoffs for Scaled Electric Vehicle Drive System", IEEE T. Ind. Appl. 56, 3020-3033 (2020).
[15] R. Hamerly, "Direct Current Transmission Lines," Physics 240, Stanford University, Fall 2010.
[16] E. Fang et. al., "A Universal Simulation Method to Calculate Power Losses of IGBTs and Anti-Parallel Diodes," Int. J. Control Automat., 9, 319 (2016).
[17] M. Boden, "Tesla Motors Batteries," Physics 240, Stanford University, Fall 2017.
{kind=link}