|
|
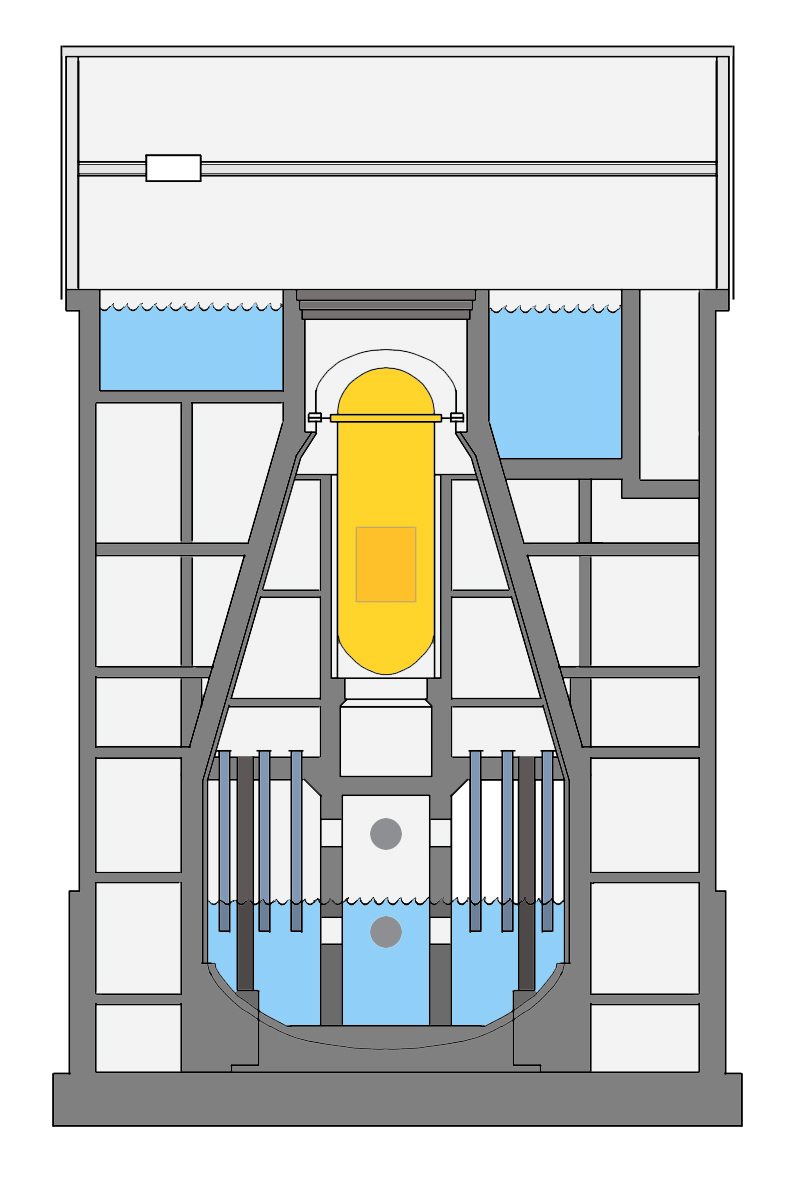
| Fig. 1: Schematic of a Nuclear Boiling Reactor - same type as Fukushima reactors. (Source: Wikimedia Commons) |
The Fukushima Daiichi nuclear disaster is one of the worst nuclear disasters in history. The damage left by the tsunami resulted in the meltdown of three out of six nuclear reactors in the plant. [1] Other incidents such as Chernobyl and Three Mile Island had little to teach Japan how to handle the situation. Chernobyl reactor was dismantled and covered with concrete. Three Mile Island melted core remained inside the pressure vessel and its buildings were in good condition. [2] The Fukushima Daiichi incident had three melted cores through the pressure vessels, the buildings were damaged, the emergency cooling systems shut down, and water leaks were discovered. [3] These circumstances left the plant's operators and the Japanese government in the dark.
The ideal solution is to send robots in to assess the situation and help fix the damage - similar to the robots used in the surgery, oil industry, or space exploration. [4] However, despite such advancements in robotics (especially from Japan), there are no robots designed for such emergencies. While some robots are designed to be used in hazardous industries such as defusing bombs, these could only be used for initial assessment. The work that needed to be performed required robots that have to be designed especially for very specific tasks in such an environment. [2]
The ambiguity of the situation inside the plant left the situation hazardous for humans to go inside. There were too many unknowns that needed to be assessed before taking next steps. This left little choice for the operators to do anything but to send robots inside the building to assess the situation.
The first robots that entered the plant were two PackBots. The robots are manufactured by the American Company iRobot. These robots were built to withstand hazardous environments and have been used by the military to diffuse bombs. The robots were customized with cameras and special sensors to take the needed measurements such as radiation level. The robots were able to enter the plant and retrieve initial measurements of the situation. These measurements were used to assess the location and duration for operators to go inside the plant while staying within the safety limits of radiation. [2,4]
Moreover, a robot designed by Hitachi-GE Nuclear Energy Company was also used to detect for leaks in the reactors water pool. The robot was used to confirm the presence of water leaks in the reactor. [3] The job now is to find a way to locate the sources of those leaks and plug them. In January 2014, Kurion, an American company was awarded a contract to develop a robotic arm to locate the source of the leak. [5]
The next phase is to plug the leaks as well as decontaminate certain areas to make it safer for operators to work inside the plant. Plugging of the leaks is expected to be performed by a robotic arm developed by Kurion as well while decontamination will be done by robots such as the ones developed by Raccon from Atox, and from Toshiba to scour materials using high pressure jets of dry ice. [2,5]
The aforementioned robots were just used to for the first two phases: Inspection and Decontamination, respectively. The 40 year plan by the operating company, TEPCO, still has 3 more phases that need to be done before the reactors are finally demolished. The first two phases alone utilized more than 14 robots. The next phases will require a more complicated robots that will be designed to perform very few special tasks. [2]
The 2011 Fukushima Daiichi nuclear disaster have showed us how the nuclear power plants communities have been lacking behind on utilizing robots for disasters response. Issues such as the lack of design to accommodate robots in Nuclear facilities as well as communication infrastructure are just a few of these technical problems. [2,4] Moreover, in his paper, Mori points out to the fact that challenges were not only technical but also personal and cultural - with "erratic planning by [the robot's operator] supervisors and personality conflicts between the front line workers and the distanced management." [4]
© Mahmood Alhusseini. The author grants permission to copy, distribute and display this work in unaltered form, with attribution to the author, for noncommercial purposes only. All other rights, including commercial rights, are reserved to the author.
[1] Y. Wakatsuki, "New Radioactive Water Leak at Japan's Fukushima Daiichi Plant," CNN, 20 Feb 14.
[2] E. Strickland, "Fukushima's Next 40 Years," IEEE Spectrum 51, No. 3, 46 (2014) [Republished as "Dismantling Fukushima: The World's Toughest Demolition Project," 28 Feb 14.
[3] Y. Humber, "Robot Inside Fukushima Reactor Discovers Source of Water Leaks," Bloomberg Business, 5 Jun 14.
[4] K. Mori, "Robotics in Nuclear Disaster Response," PH241, Stanford University, Winter 2013.
[5] M. Rodriguez, "Colorado Robot to Help Fix Japan Nuclear Disaster," Denver 9 News, 13 Apr 14.
{kind=link}