
|
|
| Fig. 1: Neutron Yield vs. Neutron Energy, after Bell. [4] (Courtesy of the U.S. Department of Energy) |
Liquid Metal Breeder Reactors (LMBR) carry the potential of providing electricity to the general public with zero greenhouse gas emmisions through the burning of existing nuclear waste. [1] Such reactors are one example of a "Generation IV" reactor type; a catch phrase for future reactors that will likely be built within the next 20-30 years. [2] These reactors are commonly referred to as being passively safe and incapable of severe meltdowns that may harm their surrounding environment. [3] This paper explores the safety features of LMBRs by focusing on the numerical modeling aspects of predicting reactor safety. First, a detailed overview of LMBRs is provided, followed by an explanation of the types of events that are simulated with numerical codes.
LMBRs operate on different design principles than the Light Water Reactors (LWRs) that provide electricity to the general public in most of the world. The essential difference between the two designs lies in the neutronics involved. LWRs use thermal neutrons - neutrons with energies of 1 eV or lower, while breeder reactors use fast neutrons - neutrons with energies of 10,000 eV or higher. [1]
In either case, the underlying principle is that neutrons (either thermal or fast) must continue to produce more neutrons to sustain a chain reaction. This is done by the fissioning (or splitting) of certain heavy nuclei. These "fissile" nuclei are extremely unstable and given enough time, they will, on their own accord, split into two fragment nuclei of roughly half the mass and release 2 or 3 neutrons in the process. [1]
Fortunately, we don't have to wait for a fissile nucleus to fission on its own, but rather we can force this event to occur with rather high probability by hitting a fissile nucleus with a neutron. Both LWRs and LMBRs operate on the principle of fissioning fissile nuclei to generate heat that will eventually be used to produce electricity. However, fast breeder reactors are also able to generate more fissile matter in the process. This process is called "breeding" whereby a "fertile" nucleus absorbs a neutron, undergoes a series of decays, and becomes a fissile nucleus. If enough fertile fuel is converted to fissile fuel, the reactor can actually create fuel to be burned later. [1]
|
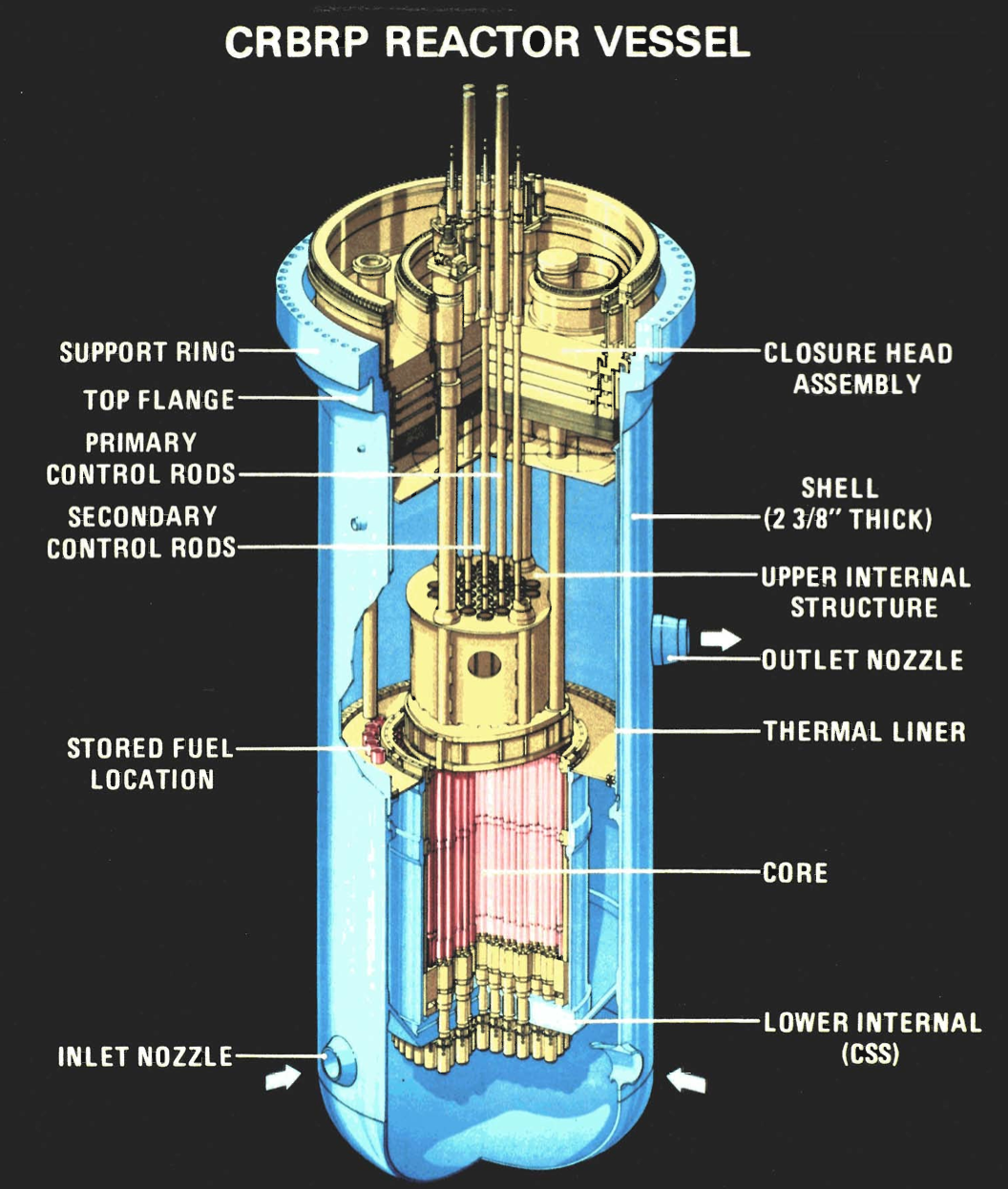
| Fig. 2: Clinch River Breeder Reactor Schematic. [4] (Courtesy of the U.S. Department of Energy) |
The road to achieving breeding can be explained through reference to Fig. 1, which shows the average neutron yield (η) vs. neutron energy for three different fissile isotopes. In order to achieve a breeding condition, neutron yields significantly larger than 2 are needed. [4] This can be conceptualized by considering that one of the neutrons must go on to cause another reaction, while yet another must be used to breed a fertile isotope. More than 2 on average is needed due to neutron losses that occur, such as a neutron escaping the core or being absorbed by some other mechanism.
The difference in the neutronics involved in dealing with fast vs. thermal neutrons leads to significantly different design principles in LMBRs and LWRs. In LWRs, the neutrons released in a fission reaction are, by nature, fast neutrons (i.e. neutrons with energies on the right side of Fig. 1). In order to thermalize the neutrons released, water is incorporated into the design, since the Hydrogen atoms in water are mass-matched to the neutron and therefore pick up a large portion of the neutron's momentum in a collision. Successive collisions with water molecules therefore reduce a neutron's energy to the thermal regime where it can be absorbed by a fissile nucleus. [5]
A breeder design, on the other hand, operates on the principle that the neutrons will not be moderated. This leads to three primary differences in reactor core design: (1) Fuel in the core is more compact in order to minimize thermalization with the coolant, surrounding steel, and other surrounding materials. (2) The fuel is more highly enriched. Fast moving neutrons have a lower probability of colliding with fissile isotopes, so a higher concentration of fissile material in the core is needed. (3) The core must be encased in a surrounding blanket of fertile fuel so that more fissile fuel can be bred in the process. [1,4]
These differences in core design are the primary reasons for concern around breeder reactor safety. [4] Faster neutrons, more highly enriched fuel, and less moderating material in the core necessitate special safety design considerations. For one, the short distances between fuel rods forces the need to use a coolant with excellent heat-extraction properties. Liquid metals and molten salts both fall into this category. This, in turn, raises safety and engineering concerns. Sodium and lead have both been considered as coolants in breeder reactors; Sodium is highly reactive with water and air, and lead is troublesome if it leaks into the outer core and solidifies, as it will expand and potentially crack the surrounding steel. [4] Molten salts, on the other hand, can be corrosive and therefore difficult to deal with in reactor cores. [6]
Despite these disadvantages, research in breeder reactor designs and reactors of this type continues, and prototypes, as well as full-scale power plants, have been built in prior years. [7] In the United States, Experimental Breeder Reactors I and II were created in roughly 1950 and 1965, respectively, both using liquid Sodium as a coolant. [8] The Clinch River Breeder Reactor, also using Sodium coolant, shown in Fig. 2, was scheduled to be built in the mid 1980's, as well (though the project was slashed by the Carter administration during construction). [7] The Phénix and Superphénix reactors in France built upon the designs of the EBR I and II reactors. Additionally, India, Japan, Russia, and China have been or currently are engaged in building reactors of this type. [7]
Although several LMBRs have been built over the years, the technology is not as developed as that of LWRs. The safety issues associated with these reactor types is a hot topic, especially as construction of breeders progresses throughout the world. The remainder of this paper will contextualize the safety research being done on LMBRs, especially focusing on the numerical modeling.
The worst possible scenario in a reactor is given the term Core Disruptive Accident (CDA). [4] Simply put, this is an accident in which the safety mechanisms of the reactor fail and chain reactions in the core run away, causing the core to get so hot that the containing structures are breached (usually through an explosion) and radiation is potentially leaked to the surrounding environment. [4]
The causes of a CDA are of great imporatance in designing a new reactor, since designing the reactor in such a way that a CDA becomes a very low probability event is a goal of reactor design. Numerical simulations allow one to explore the possibility of a CDA through modeling of the physical processes that lead to such an event and to simulate and optimize reactor designs to minimize the probability of a CDA occurring. Here, a brief overview of the physical processes that occur in a CDA are provided. The subsequent discussion is on the physics models used in numerical codes.
In a CDA, the primary reactor safety systems are assumed to fail. In a LMBR, this means that all of the coolant loops stop functioning and the reactor shutdown systems fail (e.g. control rods do not function). This will lead to the build-up of heat in the core due to coolant loss. Within 30 seconds, the liquid metal (e.g. Sodium) still in the core begins boiling, forming voids in the fuel rods and condensing on the cooler surrounding structures. [4]
After this initial 30 seconds, the casing around the fuel rods and the fuel itself begins to melt. The material in the core is now a multiphase fluid, where different parts of the reactor consist of both solid and fluid components. The fluid components can have very different heat transfer properties and also have feedback effects that lead to nonlinear behavior of the fluid components. Gases formed from fission products and the vaporized metal coolants (e.g. boiled Sodium) can also cause high interior pressures, which violently force inner parts of the core to the outer walls. [4]
The behavior of different reactor components inside the core during a CDA are extremely complex and sensitive to initial conditions of the core geometry and heat properties at the time of shutdown. One worries in particular about fuel melting together in such a way that it forms a critical mass, essentially turning the core into a nuclear bomb. Through simulation, it is hoped that insights into the physical processes involved in a CDA can be understood so that the reactor can be designed in a configuration incapable of such catastrophic failure if reactor safety mechanisms were to fail.
In 1974, breeder research in the United States led a group of researchers at Los Alamos National Lab to develop a computer simulation code called SIMMER (Sn Implicit Multifield Multicomponent Eulerian Recriticality) to simulate a CDA. [9] The code is currently being modified by foreign research groups into what are called SIMMER III and SIMMER IV. Here, a description of the physics basis in the original (SIMMER and SIMMER II) codes is provided, with a brief description of current research efforts with the SIMMER III and IV codes. Note, however, that the research effort behind SIMMER has been essentially dropped by the United States, while Japan and Europe continue to develop the code.
SIMMER models the fluid dynamics of the core with an Eulerian numerical scheme. The core is spatially discretized into a mesh of fixed points, with fluid properties being calculated inside each cell for every time step. Generally, this would be done using a 3D code. However, most reactors are cylindrical in shape and have a decent amount of symmetry in the angular direction, so that only a 2D cross section of the core is modeled.
Solids, liquids, and vapors are kept track of separately as "fields" with each field containing different "components'', corresponding to a different type of material. Conservation of mass and energy equations require that the density of each component of each field be calculated in every cell every time step and account for any phase changes, drag forces, heat exchange with other components, and any work done on the material. [4]
Calculating these quantities often requires specific knowledge of coefficients that correlate material properties. For example, each component has a different Reynold's number, which would have to be known in order to use simulations as a predictive tool. In these cases, experimental data must be used just to find these coefficients, and the coefficients may vary with the particular phenomenon being modeled. These quantities are usually determined by running SIMMER multiple times to fine-tune the coefficients with experimental data. [4]
Another issue in modeling core phenomena is in predicting the neutronics involved as the core changes form. The melting and flows of materials fundamentally change the way neutrons propagate throughout the core, and this is particularly important to keep track of, since the neutronics determine reactor criticality. To model this, the full neutron transport equation is needed, which is in itself difficult to solve. [4]
The above description of physics models used in these numerical codes is primarily aimed at giving a feel for the high degree of complexity in developing a code that can accurately predict the behavior of a reactor in a CDA. Ultimately, the experiments performed are the true test of its predictive capability. The original SIMMER II code provided many insights into LMBR design and successfully predicted the results of experiments conducted at the time. [4] Currently, SIMMER III and IV are being developed to enhance the models used in SIMMER II. As computing power increases, the code also must be adjusted to take advantage of the full computational resources. [9]
While research in this area has been going on for roughly 30 years, more research is needed to fully understand and model CDAs. As the predictive capability of these codes increases, reactors may be designed to minimize the possibility of a CDA and thereby allow for the safe production of energy from breeder reactors.
© Daniel Rehn. The author grants permission to copy, distribute and display this work in unaltered form, with attribution to the author, for noncommercial purposes only. All other rights, including commercial rights, are reserved to the author.
[1] A. Waltar and A. Reynolds, Fast Breeder Reactors (Pergamon Press, 1981).
[2] Review of DOE's Nuclear Energy Research and Development Program (National Academies Press, 2008).
[3] T. Blees, Prescription for the Planet: The Painless Remedy for Our Energy and Environmental Crises (BookSurge Publishing, 2008).
[4] C.R. Bell, "Breeder Reactor Safety - Modeling the Impossible," Los Alamos Science 2, No. 3, 98 (Summer/Fall, 1981).
[5] M. G. Stevenson and J. F. Jackson, A Primer on Reactor Safety Analysis," Los Alamos Science 2, No. 3, 5 (Summer/Fall, 1981).
[6] R. W. Moir and E. Teller, "Thorium-Fueled Underground Power Plant Based on Molten Salt Technology," Nucl. Technol. 151, 334 (2005).
[7] T. B. Cochran et al., "Fast Breeder Reactor Programs: History and Status," International Panel on Fissile Materials, February 2010.
[8] C. E. Till and Y. I. Chang, Plentiful Energy: The Story of the Integral Fast Reactor (CreateSpace, 2011).
[9] K. Morita et al., "Experimental Verification of Fast Reactor Safety Analysis Code SIMMER-III for Transient Bubble Behavior with Condensation," Japan Atomic Energy Agency, 14 Mar 06.