 |
| Fig. 2: Strapdown INS flowchart |

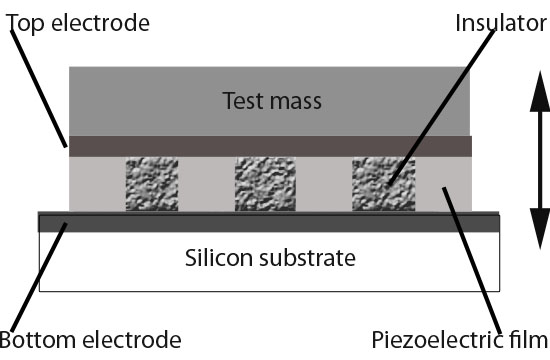 |
| Fig. 3:Piezoelectric accelerometer. |
At this point we integrate and obtain the object's current velocity and position (in the external inertial reference frame), and if we wish to use a different reference frame then it's straightforward from here.
The Eyes and Ears of INS: Accelerometers and Gyroscopes
Accelerometers are, as their name indicates, acceleration sensors. There is a wide variety of accelerometers, differing in the way they measure the acceleration, their range and accuracy. For example, there are mechanical accelerometers that measure the position of a test mass coupled to a spring; piezoelectric accelerometers that measure a change in voltage due to the compression of a piezoelectric crystal; and a series of microelectromechanical (MEMS) that rely on various principles for their operation but share their scalability and miniaturization. In the following lines we will describe the functioning of some of these devices.
Nemirovsky et al. [8] designed an accelerometer based on the piezoelectric effect (voltage/charge response to mechanical stress). In their device, a thin film of piezoelectric material is held between a test mass and a substrate. When subject to acceleration along its sensitive axis (marked as the arrow in Fig. 3) the piezoelectric material is subject to stress due to its coupling to the test mass, and the generated charge is sensed and then processed in order to produce the sensor's output.
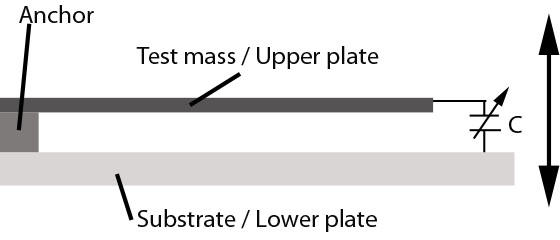 |
| Fig. 4: MEMS accelerometer. |
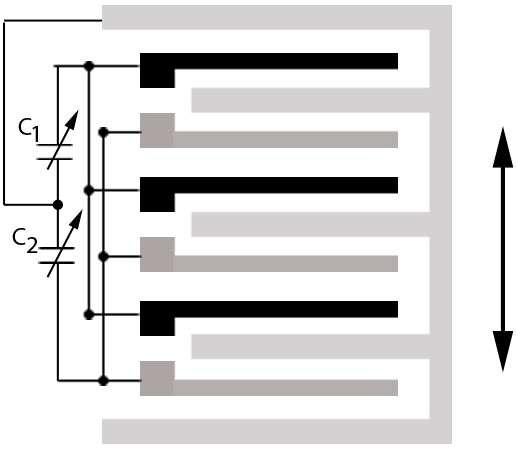 |
| Fig. 5: MEMS accelerometer. |
 |
| Fig. 6: MEMS accelerometer. |
Boser and Howe [7] describe a set of surface micromachined accelerometers, and here I present the proposed designs for two of them. The operating principle of such accelerometers is measuring the variation in capacitance caused by the motion of the proof mass. One of them, depicted in Fig. 4, is sensitive to out-of-plane accelerations (marked with the arrow), while the other one (Fig. 5) is sensitive to acceleration in one of the in-plane axes.
In the first device, the capacitance between the proff mass and the substrate is larger (mainly due to the larger area) than in the second one, and measuring the variations in it is easier but there are potential asymmetry issues, having a better performance with small displacements.
Modeling the capacitance in the second device is more complicated due to the effect of fringing fields, and its sensitivity is limited in the small-displacement regime.
Roylance and Angell [6] designed an accelerometer consisting of a silicon beam with a p type resistor on top. When the device is accelerated in the direction normal to the surface of the silicon beam, the beam bends and a change in resistance is measured. A second resistor is included for the correction of temperature-caused variations in resistance. In Fig. 6 a very conceptual sketch of the device is shown.
Originally the term gyroscope was used for describing a device invented by Leon Foucault, consisting of a rapidly rotating disk with a heavy rim, which was mounted in a set of low-friction gimbals (Fig. 7). This was part of Foucault's effort to study Earth's rotation, along with the experiment that showed the rotation of the plane of oscillation of a pendulum. Now we understand for "gyroscope" any device that is used to measure the rotation θ (or the rate of rotation ω) of an object, and their design and functioning is very diverse. In the following lines we will briefly describe a few of them.
 |
| Fig. 7: Original gyroscope [14]. |
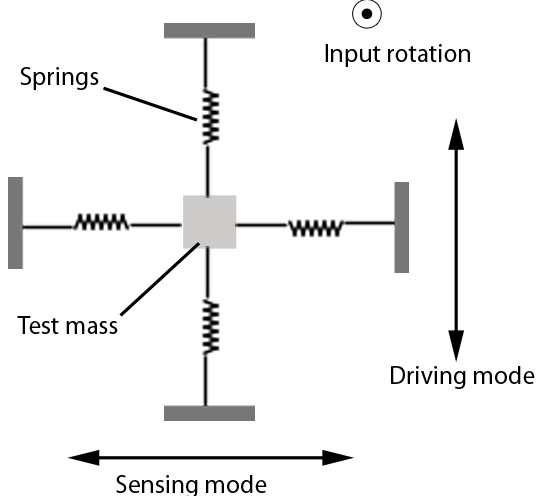 |
| Fig. 8: Vibrational gyroscope. |
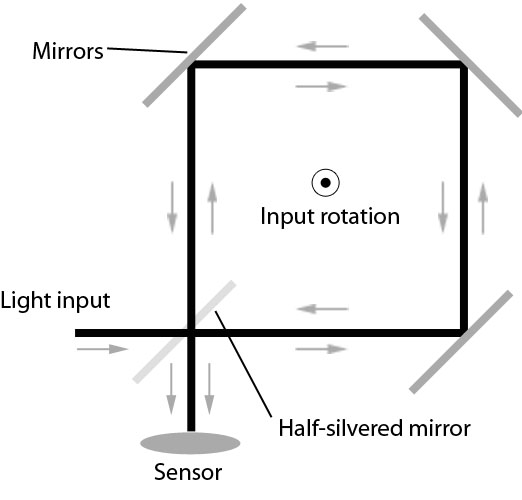 |
| Fig. 9: Optical gyroscope. |
Several gyroscope designs use the fact that a combination of turning rate and Coriolis effect couple different vibrational modes of the sensing structure. The system is driven in one vibrational mode and then sense the undriven mode, which is an indicator of the rotation rate. A basic design is shown in Fig. 8, but it could also use vibrating beams or wires, tuning forks, cavities, or more complicated structures as presented by Weinberg and Kourepenis [9], Chen et al. [10], and Xu et al. [11].
Optical gyroscopes are radically different compared with mechanical gyroscopes. They used the Sagnac effect, which arises when a beam of light travels along a closed path. If the loop then rotates with respect to an inertial reference frame, the actual length traveled by light going in opposite directions inside the loop differs (in order for the beam to return to a fixed point in the rotation loop). This is detected using interferometric techniques and the rotation rate can be determined. Since the sensing device relies on light and not an inertial property in order to measure rotation, it has a better performance than mechanical gyroscopes in a non-stabilized environment, such as strapdown IMUs.
Such gyroscopes can be built using mirror arrays, fiber optic loops, or lasing cavities. There is a great amount of literature containing a more detailed description of the functioning and design of these devices [5, 12, 13].
Sources of Error
INS are very complex systems, so there is a large variety of possible errors that should be accounted for. These errors could be due to the sensors (accelerometers and gyroscopes), or in the processing unit, for example. A more detailed (but by no means complete) list of the incurred errors is below:
- Noise in the sensor signals.
- Errors in the sensing devices, such as: bias, nonlinearity, scale factors, asymmetry, dead zones, quantization. These types of errors are represented in Fig.
- Sensor misalignment, resulting in non-orthogonal axis in the object's reference frame. Controllable by using more than the minimum number of sensors (redundancy).
- Imprecise gravity model. Since gravity has to be accounted for in the accelerometer's measurements, if the used model is not precise it will result in navigation errors.
- Numeric computation error. The numerical integration carried out when calculating the object's velocity and position is bot perfect, and several errors result by approximating an integral with a finite-interval sum.
- Analog-to-digital conversion error. When converting sensor output from analog signals into digital ones that will be fed into the navigation computers, there is room for error, quantization being the most common one.
- System initialization errors. The INS needs initial parameters for the object's position, attitude, and velocity. If such input is not correct it will affect the system's accuracy.
What about GPS?
As we have seen, while INS are standalone systems, they do not work well for long periods of time, due to the accumulation of error. Global Positioning Systems (GPS) rely on a network of satellites and in the triangulation of their signals in order to calculate the position of the receiver. This works very well, with accuracies on the order of 10m (main sources of error in GPS are discussed in [5]), but the downside is that the receiver needs to be able to detect the signals from at least three satellites, thus limiting its applicability in heavily forested areas, underwater navigation (like submarines, ocean floor mapping, and others), underground positioning (inside a mine shaft or a tunnel, for example), and in some extremely rugged terrains (naturally or man-made). Also, GPS provides information about the position, but not the attitude, of the object in question. In the field of military applications, relying too much on GPS is potentially dangerous, since the satellite network could be intentionally or accidentally shut down or jammed, crippling the navigation capabilities of missiles, for example.
As we can see, neither INS nor GPS are the unique solution to our navigation needs, but they can be used together in what is called aided systems, combining the strengths of each one in order to overcome the other's weaknesses. One such system is that which uses INS for the main navigation algorithms, but from time to time receives input from a GPS receiver, correcting and compensating for the error in the INS.
Other applications of IMUs
Geodesy pertains to the determination of coordinates for points on Earth's surface. Thus, using INS (or more precisely, IMUs) in order to calculate the position along a path is useful for this sense. However, the level of accuracy expected for geodetic measurements is on the order of 10-2m of better, so INUs need to be used with a lot of external information if we are to be able of correcting errors. One of the particular uses along this line is in the Inertial Survey System, using inertial measurements to determine point coordinates in a geodetic network.
If we combine the accuracy of GPS in determining the position of an object and the capabilities of IMUs for sensing forces it is possible to map the gravitational field above Earth's surface. This can be later be analyzed and related to probable mineral or petroleum deposits, and also used for improving the gravity model used in compensating INS measurements in later missions [5]. This approach doesn't combine GPS and INS in order to correct each other's inaccuracies; rather, it takes advantage of the different functioning of them in order to use their outputs to calculate the gravity field, thus combining the errors from both GPS and INS.
 |
| Fig. 10: Types of sensor errors [3] |