|
|
| Fig. 1: Different magnetic interactions. a) demagnetization effects; b): exchange interaction; c) magnetic anisotropy; d): dipole interaction. |
This report discusses the phenomenon of magnetostriction, in which ferromagnetic materials change shape as a function of their magnetization. After discussing the microscopic origin, the emphasis will be on (inadvertent) consequences and applications thereof, especially focusing on electric hum in transformers and TL-lamps as well as on SONAR.
While the British physicist James Prescott Joule was studying ferromagnetic materials in the early 1840s, he discovered that his samples seemed to change shape when he tried to change their magnetization (see [1], [2] and references therein). A systematic study hereof led to the firm establishment of the phenomenon which we nowadays know as magnetostriction: the change of shape of materials when under the influence of a magnetic field.
Although quite a lot of materials show magnetostrictive effects, the most pronounced illustration hereof can be found in ferromagnets; we will therefore focus on magnetostriction in ferromagnetic materials for the remainder of this report.
Phenomenologically, ferromagnetism has been known for at least 2500 years: both the ancient Greeks (Aristotle and Thales of Milete as the most famous of them) and the Chinese have reported on the strange properties of magnetized iron (ferrum in Latin, hence the name).
 |
| Fig. 2: domain structure in a ferromagnet without (a) and with (b) an externally applied magnetic field. |
The formation of seemingly spontaneous order in ferromagnetic materials has puzzled many scientists throughout the ages, and it took until the advent of quantum mechanics before an accurate microscopic theory on the origin of ferromagnetism could be established (see [3], [4] and references therein).
Ultimately, the origin of the magnetization in a ferromagnet can be explained through the presence of (spin and orbital) angular momentum in the electrons of The material. As often the spin angular momentum dominates over the orbital angular momentum, it is fairly common in the scientific literature to refer simply to the "spin" of the electron as being the ultimate origin of ferromagnetism, although this is strictu sensu not correct.
The phenomenological, spontaneous alignment of the electron spins in domains (see figure 2a)) can be explained through the presence of several competing interactions between the electron spins, and between the electron spins and their environment:
The combination of these competing energetic interactions leads to a complex magnetization behavior in ferromagnets, often characterized by the presence of so-called magnetic domains (see fig. 2a). The presence of these non-aligned domains in a ferromagnet allows the magnetization within one domain to be aligned (favorable due to the exchange interaction), allows the magnetization and hence the magnetic field lines to close within the ferromagnet (favorable in terms of the demagnetization energy), and allows the magnetization to align along certain crystal orientations - which reduces the anisotropy energy.
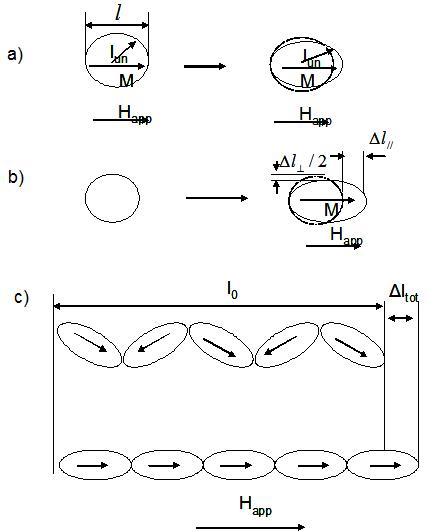 |
| Fig. 3:Microscopic origin of magnetostriction. a) a monocrystalline material with unixial axis lun deforms when magnetized; b) a polycrystalline grain deforms when magnetized; c) a ferromagnetic domain structure changes under the influence of an external magnetic field, and subsequently changes shape. |
When an external magnetic field is applied to the ferromagnet, two phenomena can occur:
Depending on the strength of the respective magnetic interactions within a particular ferromagnet, either one of those responses will be predominant.
The ultimate origin of magnetostriction can be attributed to the same spin-orbit interaction that causes the magnetic anisotropy energy: the spin of the electron couples to its orbital angular momentum, and this orbit interacts with the ionic core of the constituent atoms of the ferromagnet and hence with the lattice as a whole.
For a unixial, monocrystalline material, the coupling of the magnetization to the lattice orientation due to the unixial anisotropy energy essentially acts both ways: it also makes it energetically favorable for the lattice to deform and align its uniaxial axis with the magnetization, as shown in fig. 3a). In total, the energy balance from which the equilibrium magnetization and crystal deformation can be derived, needs to account for 3 interactions:
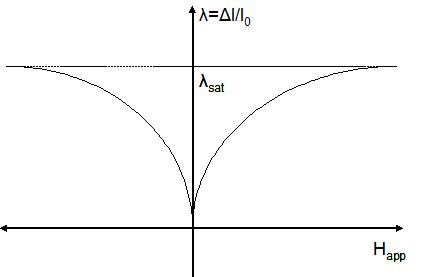 |
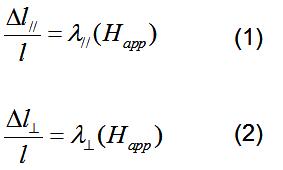
| Fig. 4: Magnetostriction parameter λ vs. applied magnetic field; not the non-linearity, and the saturation value reached at high fields. Adapted from [1]. |
From the above, qualitative analysis, one can get a flavor for how intricate an accurate analysis of magnetostriction can be (see also [4] for a more detailed description). Not only does the magnitude of the effect critically depend on the type of material involved (in view of its magnetization, mechanical deformation, and anisotropy properties), it is also highly non-linear with the applied external magnetic field: for small fields, the non-alignment of magnetization and field is energetically favorable to straining the material so as to align the field, the magnetization, and the crystal.
Moreover, most commercially used ferromagnets are essentially polycrystalline materials, in the sense that they consist of small, often sub-μm crystallites with random crystal orientation. In such materials, the averaging over the different crystal axis orientations makes the microscopic analysis of magnetostriction rather involved. However, in view of the quadratic dependence of the uniaxial anisotropy on the direction cosine of the magnetization (Ean ~sin2(θ), cf. Fig. 1c)), cancelling-out does not occur, and an overall effect is typically still present in polycrystalline materials, often characterized in terms of two parameters:
in which the first equation refers to the deformation of the polycrystalline domain, parallel to the externally applied field, and the second to the deformation perpendicular to the applied field. We refer to Fig. 3b) for an illustration hereof. Note that the magnetostriction constants λ are explicitly field dependent.
A macroscopic body, consisting of many domains, each comprising many individual crystallites, will therefore deform when under the influence of an externally applied magnetic field due to the realignment of the magnetic domains (either due to rotation or domain growth, cf. supra) and the subsequent deformation of those domains. A schematic illustration can be found in Fig. 3c).
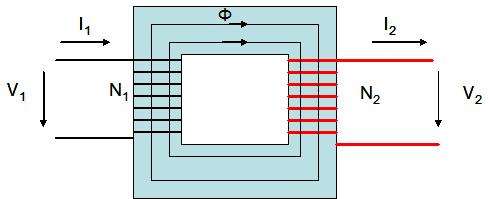 |
| Fig. 5: Operation principle of a transformer: an AC voltage V1 &applied to a coil with N1 windings yields a voltage V2=N2/N1V1 at the output of a flux-coupled coil. |
In most common ferromagnetic materials, the mechanical deformation will saturate at high enough externally applied magnetic fields (on the order of 1000 Oe), as illustrated in Fig. 4. For fairly common nickel and cobalt alloys, saturation magnetostriction constants λsat of several 10 ppms (parts per million) are reported, making magnetiostriction a small but not unimportant effect in terms of possible parasitics and applications - cf. infra. In order to reduce parasitic effects due to magnetostriction, special alloys need to be used which have (close to) zero magnetostriction - especially permalloy, an alloy of around 20% iron and 80% nickel ([1]).
By combining iron with rare earth metals into intermetallic compounds, materials scientists have managed to generate "Giant magnetostrictive" materials with magnetostriction constants in the 0.1% range. Although gigantic uniaxial anisotropy energies often make it difficult to effectivley harvest this magnetostriction (we refer to the energy balance determining magnetostricion above), requiring fields of 10s of T to obtain reasonable effects, some of these intermetallics have founds practical applications, especially the material commonly known as Terfenol-D (Tb0.27Dy0.73Fe2), which has been successfully applied in mechanical actuators and SONAR (cf. infra, as well as [5] and [6] and references therein).
As a material showing magnetostrictive behavior can change its shape under the application of a varying magnetic field, the application of an AC magnetic field by means of e.g. an inductive coil will lead to a periodic oscillatory expansion/contraction of the magnetostrictive material. This effect can be used actively, as in transducers, or can act as a parasitic. We will discuss two common examples of both: the parasitic electric hum in transformers and TL lamps, and a particular acoustic transducer relying (historically) on magnetostrictive actuators: sonar.
One particular instance in which magnetostriction manifests itself as a parasitic phenomenon, is in the presence of 120Hz "electric hum" in transformers and other ferromagnetically loaded inductors (where the ferromagnet acts so as to increase the (mutual) inductance, but also undergoes periodic magnetostrictive deformation).
 |
| Fig. 6: a) schematic illustration of a transformer with a ferromagnetic core: in order to increase the flux coupling efficiency, both coils are often wound on top of each other; b) during the first half of the electrical cycle, the magnetization points to the right; when maximum, the ferromagnetic core elongates maximally; c) during the second half of the electrical cycle, the magnetization points to the left; when maximum, the ferromagnetic core expands maximally; d) the voltage and flux over/through the coils as a function of time - one electrical period TAC is shown. |
Transformers operate by the grace of Faraday's or Lenz's law: a (periodically) changing magnetic flux induces a (periodically changing) voltage. In a coupled inductance circuit, applying a periodically varying voltage on one coil with N1 windings will give rise to a periodically varing flux Φ through that circuit, which is picked up by the other coil (N2 windings) in the circuit (see fig. 5):
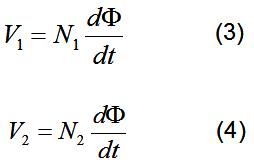
By using a ferromagnetic core, the flux lines can be effectively coupled from one coil to the other (remember that demagnetization effects effectively "suck" field lines into ferromagnetic materials), yielding the following voltage transformation:
Hence, without electrical connection between the two
coils, the AC voltage in one coil is
 |
| Fig. 7: Principle of operation behind active SONAR: a transmitter emits acoustic waves, which bounce off an object and are subsequently detected by a receiver. |
As a ferromagnetic coil acts so as to enhance the flux coupling between the coils in a transformer, and hence its efficiency, it is also subject to a periodically varying magnetic field due to that same flux. As illustrated in fig. 6, and taking into account the fact that magnetostriction is independent of the sense of the magnetic field (see Fig. 4 above), the ferromagnetic coil will expand and contract twice during each electrical cycle, giving rise to a 120Hz vibration of the core (for a US AC frequency of 60Hz, compare to 100-50Hz in Europe and other parts of the world). When this vibration couples to the outside world - either through contact with the housing of the transformer, or through the vibration of the air surrounding it (by definition known as sound), we can hear it as a 120Hz hum.
Beyond transformers, other electrical components containing ferromagnetic cores of induction coils (TL lamps, rather cheap loudspeakers, ...) can also show this characteristic hum, although to a lesser extent than high power transformers - in view of the strong field- and hence voltage/power-dependence of magnetostriction, low-power electronics is particularly less prone to it. Moreover, besides 120Hz tones, higher harmonics can often be heard as well, although with less intensity than the 120Hz fundamental.
SONAR (an acronym for Sound Navigation and Ranging) is arguably what has allowed the battle over the Atlantic to be won by the allies against the German U-boat fleet during WWII. Initiated near the end of WWI, SONAR research allowed for underwater targets and ships to be detected and their distance/speed/movement to be accurately gauged. We refer to [5] and [6] for an interesting review of the early developments in underwater sound transmission and detection.
The operation principle of SONAR is fairly simple, and is illustrated in figure 7 for the case of active SONAR (as opposed to the passive variant which is more predominant in submarines, active SONAR is used in patrol aircraft and surface ships). A transmitter emits an acoustic pulse in the Hz-kHz range, which subsequently propagates through the water. When an object is hit, a reflected wave can be picked up by a receiver. By detecting the time delay between the pulses, the Doppler shift and (for arrays of detectors/transmitters) the relative intensities of the different received waves, both the distance, speed, size and movement direction of the object can be estimated.
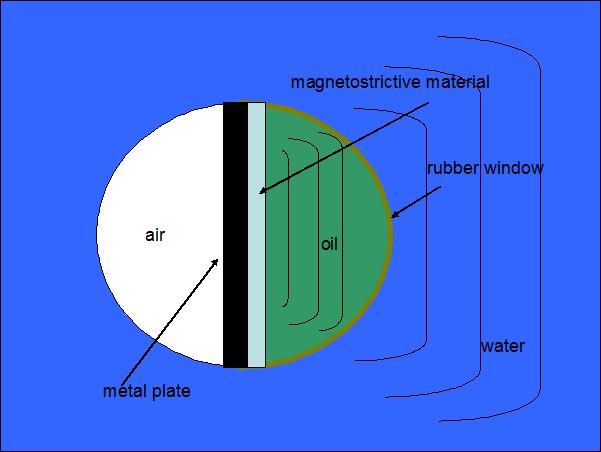 |
Fig. 8: a simplified model of a WWII-era sonar transmitter: a magnetostrictive actuator generates sound waves inside an oil medium, which are subsequently transmitted through a rubber 'window' into the water. Modified from [5]. |
The detected signal intensity can be derived as follows:
where I0 is the emitted sound intensity (in W/m2) from the transmitter of spherical dimension r0, d the distance between the transmitter and the object, and A the size of the object. We assume perfect emission into 4π starradians, hence no directivity of the transmitter/receiver - not entirely correct, but the directivity of most SONAR systems is usually not great either. For a detection threshold of, say, 0.0001 W/m2 and an object of 10 m2 at a distance of 100 m, a emitted intensity I0 of 104W/m2 would be required.
This emitted acoustic intensity can be related to the amplitude of the travelling pressure wave, Δp, as follows:
where ρ is the density of water (~1000 kg/m3) and c the propagation speed of sound in water, ~ 1500 m/s. In our example, this would yield a pressure wave amplitude on the order of 104 Pa, which isquite large compared to the 1 bar pressure near the water surface. For such high-amplitude waves, actuators made of giant magnetostrictive materials are particularly useful (ironically, the giant magnetostrictive alloy Terfenol-D was actually invented at the Naval Ordinance Laboratory during a quest for giant magnetostricitive alloys to be used in SONAR).
The operation principle of a WWII-type SONAR transmitter is schematically illustrated in figure 8 (more recent ones are often still classified as military secrets): a magnetostrictive tranducer is actuated electromagnetically, and induces vibrations/sound waves inside an oil reservoir. This reservoir is connected to the seawater by means of a rubber window, the vibration of which launches acoustic waves into the surrounding seawater. This three-layered actuation scheme acts so as to impedance match the magnetostrictive alloy to the seawater: as in the case of electromagnetic sources and transmission lines, the power efficiency of the actuation critically depends on the matching of the acoustic impedance of the actuator to the medium in which the acoustic wave is to propagate. In the example shown in fig. 8, an efficiency of around 50% has been reported ([5]).
Although not all SONAR systems rely on magnetostriction (piezoelectric materials are a particular competitor, especially for higher frequency systems when losses due to Eddy currents in the magnetostrictive alloys become troublesome), a large number still do. Most of these employ giant magnetostrictive alloys, Terfenol-D in particular, for their large amplitude vibrations as well has high-power handling capability.
Besides SONAR, magnetostrictive alloys have been used for actuators in such applications as hearing aids, loud-speakers, etc. - we refer to [1] and [2] for specific examples.
Magnetostriction, in spite of its rather intricate microscopic origin, has a reasonably well-established phenomenology, 165 years after its initial discovery. Besides occuring as a parasitic effect as electric hum in ferromagnetic cores in transformers and other coil-based devices, magnetostriction and especially giant magnetostrictive materials have proven their use in actuator-applications where electromagnetic energy needs to be transformed into mechanical vibration energy or sound. The example we discussed, SONAR, is particularly important: who knows how WWII would have run without magnetostriction-based SONAR to keep the U-boats from sinking convoy ships on the Atlantic?
© 2007 Kristiaan De Greve. The author grants permission to copy, distribute and display this work in unaltered form, with attribution to the author, for noncommercial purposes only. All other rights, including commercial rights, are reserved to the author.
[1] A. R. Piercy, Phys. Educ. 32, 160 (1997).
[2] A. del Moral, Europhys. News 34, 6 (2003).
[3] L.D. Landau, et al., Electrodynamics of Continuous Media, 2nd ed. (Butterworth-Heinemann, 1984).
[4] W. F. Brown, Jr., Magnetoelastic Interactions( Springer, 1966).
[5] R. J. Urick, Principles of Underwater Sound (McGraw-Hill, 1967).
[6] L. S. Howeth, History of Communications-Electronics in the United States Navy, (U.S. Bureau of Ships and Office of Naval History,1963).